



При создании искусственных лесов уделяется большое внимание качеству посадочного материала, от которого в значительной степени зависит успех лесовыращивания. В настоящее время наиболее перспективным в качестве посадочного материала является использование сеянцев с закрытой корневой системой (брикетированные / контейнеризированные), которые считаются наиболее перспективными и надёжными. Такие сеянцы (рис. 1а) выращиваются, как правило, в условиях теплиц, где регулируются температурные и влажностные условия (рис. 1б). Сеянцы выращиваются в специальных кассетах, наполненных субстратом. В качестве субстрата используется верховой торф, который отличается высокой влагоудерживающей способностью, не слеживается, обладает антисептическими свойствами [Жигунов].
Практически все процессы при выращивании брикетированных сеянцев автоматизированы, но есть часть операций, где все ещё требуется тяжёлый и утомительный ручной труд. Так большой проблемой, которая на сегодня не решена, является прополка сорняков и пикировка сеянцев.
В качестве сорняка в теплицах часто встречается маршанция изменчивая (Marchantia polymorpha L.) – многолетнее слоевищное растение из отдела «Печёночные мхи», от которого сложно избавиться (рис. 1а). Влажный микроклимат теплиц создаёт идеальные условия для развития маршанции. Маршанция имеет мясистые лопастные слоевища, которые образуют плотный «ковёр» и закрывают субстрат, конкурируя с сеянцами за воду и питательные вещества. Не все химические препараты, рекомендуемые для борьбы с этим растением, разрешены к применению [Егоров]; [Landis], что часто приводит к необходимости применения большого объёма ручного труда.

Рис. 1. Выращивание сеянцев с закрытой корневой системой:
а – сеянец сосны с маршанцией; б – выращивание сеянцев в теплице. Фото из открытых источников
Также большой объём ручного труда используется при пикировке – пересадке сеянцев, которая необходима, поскольку при подготовке кассет сеялка высевает в одну ячейку не менее 2-х семян (зависит от их всхожести), а в ячейке требуется всего один сеянец. В некоторых ячейках может появиться по два-три сеянца, а в некоторых может вообще не быть всходов. Поэтому часто приходится вручную регулировать количество сеянцев в ячейках: пересаживать сеянцы в ячейки, где нет всходов, и удалять излишние сеянцы в ячейках, где сеянцев больше одного.
Ручная борьба с сорняками и пикировка сдерживает производительность труда при выращивании сеянцев с закрытой корневой системой, а значит требуется найти эффективные методы автоматизации данных операций.
В сельском хозяйстве уже успешно внедряют новые технологии для автоматизации ухода за растениями, включая борьбу с сорняками. Для выявления перспективных технологий был проведён литературный обзор применяемых методов и технологий.
Так, в Канаде успешно ведутся работы по разработке роботов La Chèvre с манипуляторами для сельского хозяйства1. С помощью набора RTK-GNSS датчиков осуществляется навигация и контролируется, а также корректируется положение сельскохозяйственной машины в пространстве. Сканирование посевов и сорняков осуществляется посредством камер и датчиков глубины. Технология SLAM (одновременная локализация и отображение) калибрует и настраивает датчики с камерой и составляют карту сорняков. Камеры и датчики визуально определяют наличие сорных растений, а установленные роботизированные манипуляторы по карте выполняют захват клешнями сорняков. именно на основании данных, полученных с цифровой карты.
Команда инженеров «Franklin Robotics» из Массачусетса придумала маленький робот Tertill, который выполняет уничтожение сорняков2. Робот уничтожает сорняки механическим способом посредством встроенного триммера. Четыре колеса позволяют роботу передвигаться по сложному рельефу. Робот работает от аккумулятора, а на верхней части робота располагается солнечная батарея, позволяющая устройству постоянно находиться в саду.
Компания по производству автономных роботов Carbon Robotics создала автономного робота для прополки сорняков, который использует компьютерное зрение для уничтожения сорняков с помощью 150-ваттного мощного лазера3. Один робот может пропалывать до 6,5 га в день, заменяя несколько бригад, занимающихся ручной прополкой. Каждый из роботов весит около 4,5 тонн. Разработчики считают, что самым большим преимуществом подхода с использованием лазера является полное отсутствие воздействия на почву и ее микробиологию.
Для использования в условиях теплиц, в которых сеянцы очень плотно находятся в кассете, использование триммера будет затруднительным, а использование манипуляторов требует точной механики и сложного обслуживания. Таким образом, применение лазерных технологий для задач борьбы с нежелательными растениями в условиях лесных теплиц может рассматриваться как наиболее перспективный метод.
В Петрозаводском государственном университете тематика автоматизации лесного хозяйства развивается институтами лесных, горных и строительных наук (ИЛГиСН) и математики и информационных технологий (ИМИТ). Одно из направлений совместной работы – поиск новых решений для автоматизации ручного труда в тепличных комплексах по выращиванию сосны и ели с закрытой корневой системой для лесовосстановления.
Основная цель сотрудничества – использование технологий нейронной сети и компьютерного зрения для автоматического распознавания и отделения саженцев сосны и ели в кассетах от сорняков. Это позволит уничтожать сорняки с помощью лазера. Система также может быть использована для части операций по пикировке сеянцев. Сначала определяется количество ячеек с двумя или тремя всходами или без них; затем вычисляется, сколько ячеек требуется для пикировки. Оставшиеся лишние или ослабленные саженцы в ячейках с двумя или тремя растениями уничтожаются лазером.
* * * * *
На первом этапе работы были проведены опыты по воздействию лазерного луча на маршанцию изменчивую и сеянцы хвойных пород. В качестве донора лазерного диода использовался списанный DVD±R/RW привод Nec марки ND-3540A. Лазерный диод был прикручен к основанию из радиатора, а в качестве фокусирующего элемента была также использована линза из привода. Так как работа с лазерами сопряжена с крайней опасностью для зрения, то все работы проводились с особой осторожностью. Для контроля работы лазера было принято решение использовать web-камеру, что позволило наблюдать воздействие лазерного луча по монитору компьютера и исключило вероятность попадания лазерного луча в глаза.
Источником питания напряжением 3.3 В выступал блок питания компьютера. Тестовое подключение лазера показало, что ток потребления составляет 0.22 А (рис. 2а). В качестве тестовых образцов использовалась как маршанция (рис. 2б и 2в), так и сеянцы хвойных растений.

Рис. 2. Подготовка к испытаниям воздействия лазерного луча:
а – ток потребления лазера; б – источник образца; в – фиксация образца. Фото автора
Предварительные испытания показали, что даже лазер из DVD±R/RW привода способен насквозь прожигать мясистую маршанцию и повреждать хвоинки сеянцев (рис. 3).

Рис. 3. Результаты испытания воздействия лазерного луча
Однако, в то же время, опыты показали, что лазер необходимо использовать аккуратно, иначе можно повредить не только сорные растения, но и ценные сеянцы. Таким образом, для реализации проекта крайне актуальным является создание системы компьютерного зрения, которая бы с высокой точностью определяла границы сеянцев для исключения повреждения как стволиков, так и хвоинок.
В основе системы компьютерного зрения планируется использовать нейронную сеть. Нейронная сеть – математическая модель, которая должна работать по аналогии с тем, как мозг человека решает разнообразные логические задачи. Отличительная особенность нейронной сети – возможность её обучения, поскольку только после этого предполагается ее дальнейшее использование. В настоящее время нейронные сети рассматривают как один из элементов для построения искусственного интеллекта [Бритвина]. Коллеги из Института математики и информационных технологий выбрали для решения задачи свёрточные нейронные сети, которые в настоящее время успешно применяются для задач компьютерного зрения [Сайфутдинов].
Для обучения любой нейронной сети необходимо собрать набор данных, называемый датасетом. В случае компьютерного зрения датасет представляет из себя большое количество изображений изучаемого объекта – сеянцев в разные этапы своего роста.
В лаборатории Института лесных, горных и строительных наук для получения датасета были произведены следующие работы:
- выращивание сеянцев сосны в лабораторных условиях;
- уход за сеянцами;
- фотографирование сеянцев на разных этапах их роста и развития.
Работа по сбору датасета началась осенью 2024 г., а закончилась весной 2025 г.
Сеянцы сосны выращивались из семян, которые после подготовки были посажены в почву, размещенную в упаковке (кассете) для яиц. Основная операция по уходу – полив, который происходил два раза в неделю (включая праздники). Сеянцы размещались на подоконнике лаборатории для лучшего освещения. После всхода сеянцев они фотографировались, частота фотографирования – один раз в несколько дней (рис. 4).
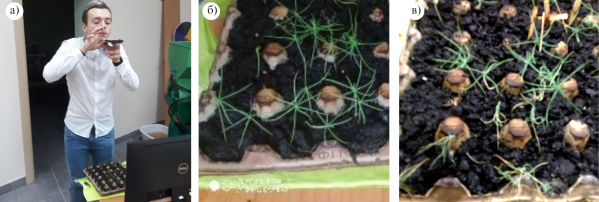
Рис. 4. Получение датасета для обучения нейронной сети:
а – процесс фотографирования; б – сеянцы зимой 2024 г.; в – сеянцы весной 2025 г.
Для сбора датасета вместе с коллегами из Института математики и информационных технологий был разработан алгоритм, который должен позволить смоделировать получение изображений с разных ракурсов и в разных условиях освещённости. Особенности алгоритма фотографирования:
а) фотографии сеянцев необходимо делать сверху с разных расстояний, ориентируясь на высоту, на которой предположительно в теплице будет висеть камера;
б) фотографии делаются до полива и после полива;
в) при фотографировании необходимо менять ракурс, перемещая камеру по кругу вокруг сеянцев;
г) фотографии делаются при разном освещении в помещении (включая и выключая свет в кабинете).
Сделанные фотографии передавались коллегам из Института математики и информационных технологий для обучения нейронной сети.
* * * * *
Проведённая работа позволила доказать потенциальную возможность воздействия лазерным лучом даже на такие сорные растения как маршанция, мясистые лопастные слоевища которой содержат очень много влаги. В то же время лазер легко повреждал и части целевых сеянцев, что требует аккуратной работы, исключающей повреждения ценных растений. Была проведена работа по сбору фотографий для датасета, который используется при обучении нейронной сети с задачей нахождения сеянцев на фотографиях, что позволит в будущем определять количество сеянцев в каждой ячейке, а также определять границы элементов сеянца для предотвращения повреждения лазерным лучом ценных растений.
Примечания
1 Можейко О. Создан умный робот для прополки сельхозкультур // Портал ООО «ГлавАграрРус». URL: https://glavagronom.ru/news/sozdan-umnyy-robot-dlya-propolki-selhozkultur (дата обращения: 12.03.2025).
2 Петрова Н. Электронная Тортилла избавит сад от сорняков // Клуб любителей дачи: сайт. URL: https://7dach.ru/NatashaPetrova/elektronnaya-tortilla-izbavit-sad-ot-sornyakov-133805.html (дата обращения: 12.03.2025).
3 Искусственный интеллект и лазерные технологии – в США представили робота нового поколения для прополки сорняков // Аналитическая платформа EastFruit: эл. ресурс. URL: https://east-fruit.com/plodoovoshchnoy-biznes/tekhnologii/iskusstvennyy-intellekt-i-lazernye-tekhnologii-v-ssha-predstavili-robota-novogo-pokoleniya-dlya-propolki-sornyakov (дата обращения: 12.03.2025).
Список литературы
Бритвина П.В. Нейронные сети: моделирование и применение в искусственном интеллекте // Вестник науки. 2023. № 8(65). С. 92-94.
Жигунов А.В. Теория и практика выращивания посадочного материала с закрытой корневой системой. Санкт-Петербург: СПб НИИЛХ, 2000. 293 с.
Методы подавления маршанции изменчивой (Marchantia polymorpha L.) и других мхов при выращивании сеянцев сосны и ели с закрытой корневой системой / А.Б. Егоров, А.А. Бубнов, Л.Н. Павлюченкова, и др. // Труды Санкт-Петербургского научно-исследовательского института лесного хозяйства. 2019. № 1. С. 25-39.
Сайфутдинов А.В. Сверточные нейронные сети для решения задач компьютерного зрения // Universum: технические науки. 2023. № 10-1(115). С. 42-44.
Landis T. A quick and easy way to measure container weight for irrigation scheduling // Forest Nursery Notes. 2015. Vol. 35, Issue 1. P. 12-13.